欢迎访问无锡市硕威智能焊接装备有限公司网站!
咨询热线:18915258107
联 系 人 : 严文鼎
手 机 :18915258107
地 址:江苏省无锡市江阴市
月城镇月山路95号
邮 编:214404
网 址 : www.wxshuowei.com
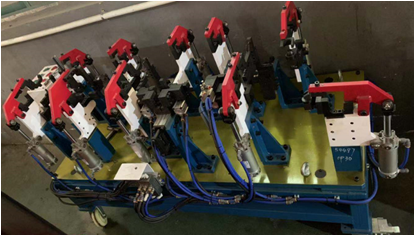
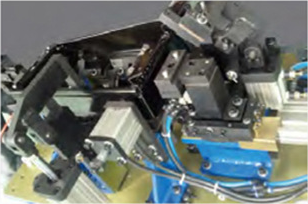
机器人焊接工装夹具与普通焊接夹具的区别
1、与普通焊接夹具不同,机器人焊接工装夹具除正面可以施焊外,其侧面也能够对工件进行焊接,可以无限延伸。
2、对零件的定位精度要求更高,焊缝相对位置精度较高,应≤1mm。
3、由于焊件一般由多个简单零件组焊而成,而这些零件的装配和定位焊,在焊接工装夹具上是按顺序进行的,因此,它们的定位和夹紧是一个个单独进行的。
4、机器人焊接工装夹具前后工序的定位须一致。
5、由于变位机的变位角度较大,机器人焊接工装夹具尽量避免使用活动手动插销。
6、机器人焊接工装夹具应尽量采用快速压紧件,且需配置带孔平台。以便将压紧快速装夹压紧。
苏公网安备 32028102001345号

 咨询热线:18915258107
咨询热线:18915258107


 全国服务热线: 18915258107
全国服务热线: 18915258107